|
تضامنًا مع حق الشعب الفلسطيني |
مصفوفة دوران
في الجبر الخطي، مصفوفة الدوران هي مصفوفة حسابية تستخدم لتدوير متجه ما أو (بعملية مكافئة) تدوير نظام الإحداثيات ذاته.[1][2][3] مثلا لتدوير متجه موضع لنقطة (x, y) بزاوية θ عكس عقارب الساعة أو تدوير نظام الإحداثيات بنفس الزاوية لكن مع عقارب الساعة فإن مصفوفة الدوران تكون
-

تدوير نقطة عكس عقارب الساعة
-
تدوير الإحداثيات مع عقارب الساعة


تستخدم مصفوفات الدوران في بعض التطبيقات في مجالات الهندسة والفيزياء والرسوميات الحاسوبية وغيرها.
يمكن التعبير عن التحويل من الإحداثيات (x, y, z) إلى الإحداثيات ('x', y', z) بالشكل المختصر
حيث
و R هي مصفوفة الدوران.
مصفوفة الدوران يجب أن تكون مصفوفة مربعة وذات عناصر حقيقية. بشكل أكثر تحديدا، تتميز مصفوفات الدوران بأنها مصفوفة متعامدة ومحددتها تساوي 1.
الدوران في بعدين
كما ذُكِر بالأعلى، فإن تدوير نقطة ما بزاوية معينة يكافئ تماما لتدوير نظام الإحداثيات نفسه بالاتجاه المعاكس.

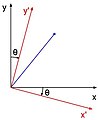
يمكننا دراسة الحالة حيث يتم تدوير نظام الإحداثيات بزاوية θ عكس عقارب الساعة (وهو الإتجاه الموجب للدوران) حول نقطة الأصل. يمكننا أن نرى أن
حيث P هي طول متجه الموضع للنقطة العامة (x, y)، و θ هي الزاوية بين المحورين x و 'x، و Φ هي الزاوية بين متجه موضع النقطة ومحور x.
كذلك
أي أن
ويمكن التعبير عن هاتين المعادلتين عن طريق المصفوفات
تذكر أن المصفوفة المذكورة في المعادلة السابقة هي لتدوير الإحداثيات عكس اتجاه الساعة، مما يكافي تدوير النقطة ذاتها مع عقارب الساعة.
عناصر المصفوفة
بما أن
و
يمكننا كتابة مصفوفة الدوران على النحو التالي
ونلاحظ أن مدخلات المصفوفة هي نفسها جيوب تمام اتجاه المحاور الجديدة نسبة إلى القديمة.
للتسهيل يمكننا أن نكتب
حيث rx'x هو جيب تمام إتجاه المحور 'x بالنسبة لمحور x والباقي بالمثل.
الدوران في ثلاثة أبعاد
كما رأينا في حالة تدوير نظام الإحداثيات في بعدين فإن الدوران يكون حول نقطة الأصل. أما في حالة الثلاثة أبعاد فإن الدوران يكون حول محور ما I يمر بنقطة الأصل. يمكننا أن نرمز لمصفوفة الدوران بالرمز أي الدوران حول محور I بزاوية θ.
الدوران حول المحاور الأساسية
من السهل دائما القيام بالدوران حول أحد المحاور الأساسية، فالعملية مشابهة تماما للدوران في بعدين حول نقطة الأصل مع تعديل بسيط.
تُعطى مصفوفات الدوران بزاوية θ عكس اتجاه عقارب الساعة حول المحاور الأساسية x و y و z على الترتيب كالآتي
الدوران حول محور z
بالفعل يمكننا أن نمثل تدوير نظام الإحداثيات حول محور z بزاوية θ
كما نرى فإن المحور z لم يتغير.
الدوران حول محور y
يمكننا بالمثل القيام بالدوران حول المحور y، وتكون المعادلة
عندما نقوم بفك المعادلة السابقة وإعادة ترتيبها، سنجد أن
والتي يمكن إعادة التعبير عنها كالتالي
يرجى ملاحظة الفرق في ترتيب الإحداثيات في المصفوفتين العموديتين.
الدوران حول محور x
بأسلوب مماثل نجد أن الدوران حول المحور x يتم التعبير عنه كالتالي
الدوران حول محور عام
رأينا فيما سبق ثلاث حالات خاصة لتدوير نظام الإحداثيات حول المحاور الأساسية. سنعطي الآن مصفوفة الدوران بزاوية θ عكس اتجاه عقارب الساعة حول أي محور يمر بنقطة الأصل و I هي وحدة المتجه لهذا المحور.
حيث Ix و Iy و Iz هي مركبات وحدة المتجه I.
عكس الدوران
رأينا فيما سبق مصفوفة الدوران التي تحول من نظام x إلى نظام 'x. وأن التعبير المختصر لتلك العملية هو
أما إذا أردنا أن نعبر عن التحويل من نظام 'x إلى نظام x فإن معادلة التحويل العكسي تصير
يمكن إثبات ذلك ببساطة عن طريق فك المعادلة الأولى وإعادة ترتيبها بدلالة (x, y, z) عوضا عن ('x', y', z) فينتج المطلوب. وهكذا تكون المصفوفة التي تعبر عن تحويل 'x إلى x هي RT. ونلاحظ أن عملية التحويل تلك تكافئ تماما الدوران في الإتجاه العكسي. أي أنه إذا كانت R هي مصفوفة الدوران بزاوية θ في الإتجاه الموجب (عكس عقارب الساعة) فإن RT هي مصفوفة الدوران بنفس الزاوية لكن في الإتجاه العكسي.
نلاحظ كذلك أن RT = R-1، أي أنها تساوي المصفوفة العكسية.
مراجع
- ^ Curtright، T L؛ Fairlie، D B؛ Zachos، C K (2014). "A compact formula for rotations as spin matrix polynomials". SIGMA. ج. 10: 084. DOI:10.3842/SIGMA.2014.084.
- ^ Taylor، Camillo J.؛ Kriegman، David J. (1994). "Minimization on the Lie Group SO(3) and Related Manifolds" (PDF). Technical Report No. 9405. Yale University. مؤرشف من الأصل (PDF) في 2017-07-05.
- ^ A bot will complete this citation soon. Click here to jump the queue أرخايف:1504.04885.